
Dezenfektan dolum makinası için motor seçimi yapmak mı istiyorsunuz? Dolum
Servo motor çalıştırılmadan önce yapılması gereken temel işlevlerin yer aldığı yazı dizimizde bir önceki yazımızda “Servo Motor Çalıştırılmadan Önce Ayarlanması Gereken Temel İşlevler” bahsetmiştik. Bu yazımızda temel işlevlerin devamı niteliğinde olup aşırı hareket ayarları ve diğer ayarlamaları sizler için bir araya getirdik.
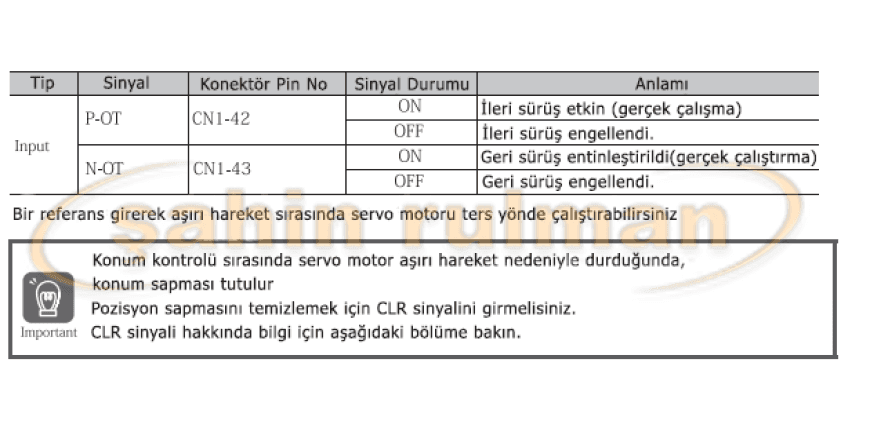
Servo motorun çalışması esnasında aşırı hareket meydana geldiği zaman servo motorun hareketli kısmı hareketin güvenli menzilini aştığı zaman harekete geçirilen limit anahtarından gelen bir sinyal girişine yanıt olarak servo motoru durdurmaya zorlayan servo motor fonksiyonu tanımlanmaktadır.
Aşırı hareket sinyalleri P-OT(Forward Drive Prohibit) ve N-OT (Reserve Drive Prohibit) sinyallerini içerir.
Limit anahtarını kurarak makineyi durdurmak için P-OT ve N-OT sinyallerini kullanın, servo motorla çalıştırılan makineyi durdurmak istediğiniz pozisyonları aşağıdaki servo kablo bağlantısı örneğinde verilmiştir.

Aşırı Hareket Sinyalleri
Aşırı hareket sinyalleri P-OT ve N-OT sinyallerini içerir.

Aşırı Hareket Ayarını Etkinleştirme / Devre Dışı Bırakma Ayarı

Servo Motor Fren Tutma
Servo motor kapatıldığı zaman makinenin hareketli bölümünün pozisyonunu tutmak için fren tutma kullanılır, böylelikle hareketli kısım yer çekiminden veya harici bir kuvvetle hareket etmez.
Servo motor üzerinde bulunan frenleri kullanabilir veya fren temin edebilirsiniz. Aşağıdaki durumlarda tutma freni kullanılmaktadır.

Fren Çalışma Sırası
Frenin boşalması için gereken süreyi ve aşağıda açıklandığı gibi, fren çalışma zamanlamasını belirlemek için frenlemenin frenlenmesi için gereken zamanı düşünmelisiniz.

/BK (Brake) Sinyal

Servo Motor Durdurulduğunda /BK (Brake) Sinyal Çıkış Zamanlaması
Servo motor durdurulduğunda, /S-ON sinyali OFF konuma döndüğünde /BK sinyali aynı anda OFF hale gelir. /S-ON sinyali OFF olduktan sonra motora giden güç kaynağını kapatma zamanlamasını değiştirmek için servo motor OFF gecikme süresini (Pn506) olarak kullanmalısınız.

Servo Motor Çalışırken /BK (Brake) Sinyal Çıkış Zamanlaması
Servo motor çalışırken bir alarm oluşursa, servo motor kendini durdurur ve fren referans çıkış hız seviyesi ayarlayarak /BK (Brake) sinyal çıkışı başlayacaktır. (Rotary servo motors: Pn507, Linear servo motors: Pn583) ve Servo motor kapatma freni komutu bekleme süresinin sonlandırılması. (Pn508)

Servo Motor Kapalı için Durdurma Yöntemi

Elektronik Dişli Ayarları
Bir yük taşımak için kullanılan konum verilerinin minimum birimi, referans birimi olarak adlandırılır. Referans birimi, hareket miktarları vermek için kullanılır, darbeler değil, uzak mesafelerde veya diğer fiziksel birimlerde (ÖR y̅̅m veya 0 gibi) anlaşılması daha kolaydır.
Elektronik dişli, referans birimlerde belirtilen hareket mesafelerini, gerçek hareketler için gereken darbelere dönüştürmek için kullanılır.
Elektronik dişli ile bir referans birimi servo paketi referans darbe girişi başına iş parçası hareket mesafesine eşittir. Başka bir deyişle servo paketi elektronik dişli çarkını kullanırsanız, darbeler referans birimleri olarak okunabilir.
Not 1 :Ana makine kontrolörüne bir elektronik dişli takarsanız, normalde servo paketindeki elektronik dişli oranını 1:1 ‘e ayarlayın.
Not 2: Referans darbe giriş çoğaltma anahtarlamasını etkinleştirirseniz, referans birimi, ana denetleyiciden girilen referans darbelerinin n katına eşit olan konum verisi olarak tanımlanır. (“n”, referans darbe giriş çarpanıdır.)
Elektronik dişli kutusunun kullanılması ve kullanılmaması arasındaki fark aşağıda gösterilmiştir.
Mutlak Servo Motor
Bu örnekte, iş parçasını 10 mm taşımak için aşağıdaki makine konfigürasyonu kullanılır.

Elektronik Dişli Oran Ayarları
Elektronik dişli oranını Pn20E ve Pn210’yi kullanarak ayarlayınız.

Elektronik Dişli Oranı Ayar Örnekleri
Bu bölümde elektronik dişli ayar örneklerine yer verilmektedir.

Mutlak Enkoderin Sıfırlanması
Mutlak bir enkoder kullanan bir sistemde, çok türlü veriler başlangıçta sıfırlanmalıdır. Mutlak kodlayıcı (A.810 veya A.820) ile ilgili alarm, mutlak kodlayıcı sıfırlanmalıdır. Örneğin güç kaynağı açık konumda olduğu zaman. Mutlak enkoderi sıfırladığınızda, çoklu yol verileri sıfırlanır ve mutlak enkoder ile ilgili alarmlar silinir. Aşağıdaki durumlarda mutlak kodlayıcı sıfırlayın. Sistemi ilk kez başlatırken
A.810 (Encoder Backup Alarm) alarmı oluşturulduğunda A.820 (Encoder Checksum Alarm) alarmı oluşturulduğunda Mutlak enkoderdeki çok turlu verileri sıfırlamak istediğinizde UYARI!
Mutlak değer enkoderi sıfırlandığında çok turlu veriler -2 ve +2 dönüşler arasında bir değere sıfırlanır. Makine sisteminin referans konumu değişir. Ana makine kontrol cihazındaki referans konumunu mutlak kodlayıcı sıfırlanmasından kaynaklanan konuma ayarlayın. Makine, ana makine kontrolöründeki konumu ayarlamadan başlatılırsa, beklenmedik şekilde çalıştırmadan dolayı kişisel yaralanmaya veya makineye zarar verebilecek nedenler olabilir.
BİLGİ
Aşağıdaki durumlarda çok türlü veriler her zaman sıfır olacaktır. Bu gibi durumlarda kesinlikle mutlak kodlayıcıyı sıfırlamak gerekli değildir.

Sıfırlama Önlemleri
A.810 (Encoder Backup Alarm) alarmını veya A.820 (Encoder Checksum Alarm) alarmını silmek için servo kutusundan /ALM-RST (Alarm Reset) sinyalini kullanamazsınız. Bu alarmları silmek için mutlak kodlayıcı işlemini kullanabilirsiniz.
Eğer bir A.8** meydana gelirse, alarmı sıfırlamak için güç kaynağını kapatın.
Hazırlıklar
Mutlak bir enkoder sıfırlaması yapmadan önce aşağıdakileri daima kontrol etmelisiniz.
Parametre yazımı yasaklı olmamalıdır.
Servo kapalı olmamalıdır.
Uygulanabilir Araçlar

Servo motor çalışmasından önce yapılması gereken temel işlevleri sizlerle paylaştık. Ayarlamalar sırasında yaşadığınız sorunlarda Şahin Rulman’dan destek alabilirsiniz. Şahin Rulman sitesi üzerinden online servo motor fiyatlarını öğrenebilir ve satın alabilirsiniz.
Dezenfektan dolum makinası için motor seçimi yapmak mı istiyorsunuz? Dolum

Fırçasız doğru akım motorlarına step motor denir. Fırçasız olan bu

Servo Motor Kontrolü Nasıl Yapılır? Bu haftaki blog yazımızda servo
Step motorlar için sürücü seçimi ve jumper ayarları ile ilgili

Servo Motorlarda Pozisyon Kontrol Modu Servo Motor, Pozisyon kontol modunda titreme

Unipolar ve Bipolar Step Motor Arasındaki Farklar Unipolar step motor