





Elektronik Ürünler, Servo Motor, Servo Motor Takım
Servo Motor 1.5 kW - 130LZ-M06025 - LZ3a-30LN
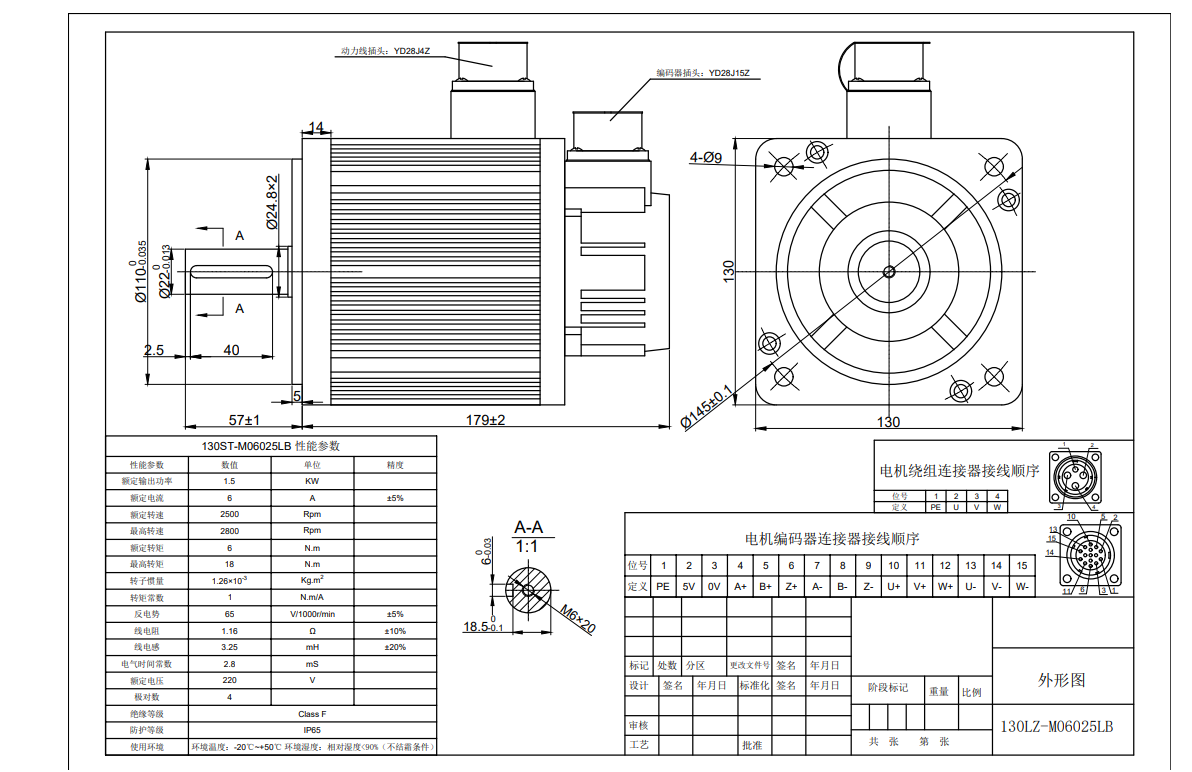
SKU: 130LZ-M06025 - LZ3a-30LN| GÜÇ | 1.5 kW |
| TORK | 6.0 Nm |
| DEVİR | 2500 dev/dak |
| FLANŞ | 130×130 mm |
$520,00
1.50 kW değerinde ve 220 volt voltaj akımına sahip model 130LZ-M06025 – LZ3a-30LN servo motor, 3.18 tork değerinde olup, Dakikada 4500 devir hızına ulaşmaktadır. 110×110 flanş gücündeki 1.50 kW servo motor fiyatını inceleyerek satın alabilirsiniz.
Harici Direnç Değerleri :220watt ,50ohm
130LZ-M06025 | LZ3a-30LN 1.50 kW Servo Motor Özellikleri
- Servo motor çalışma ortamı: Operation: 0℃ ~ 40℃ Storage: -40℃ ~ 50℃
- Kutuplar: 4 kutuplu servo motor
- Arttırımlı enkoder çizgi: 2500 / 5000PPR
- Absolute enkoder: 17
- Nem Oranı maksimum: Çalışma (Yoğuşmasız şekilde) %40 ~ %80 Depolama: (Nemsiz yoğunlaşma şeklinde) %93’ün altında
- Yalıtım Sınıfı: B
- Servo Motor Koruma Sınıfı: IP54
- Servo Motor İzolasyon Gerilimi: AC1500V, 2 dakika
- Servo Motor İzolasyon Direnci: DC500V, 10MΩ veya daha fazla
- Yapı: Kendinden soğutmalı servo motor
- Titreşim: 2.5G veya daha az
- Rakım: 1000m veya daha az
- Çalışma: Servo motor aralıksız çalışır.
- Servo Motor Montaj: Flanşlı Montajı
LZ3A Uyumlu Servo Motor Özellikleri
| Model | LZ3-20L | LZ3-30L | LZ3-40L | LZ3-50L | LZ3-75L | LZ3-25H | LZ3-50H | LZ3-75H |
| Giriş Güç Kaynağı | Tek faz / üç faz 220VAC -15%~+10% 50/60Hz veya Üç faz 380VAC -15%~+10% 50/60Hz | |||||||
| Çalışma Sıcaklığı | 0℃ ~ 40℃ | |||||||
| Depolama Sıcaklığı | -40℃ ~ 50℃ | |||||||
| Çalışma Nemi | 40% ~ 80% (yoğuşmasız) | |||||||
| Depolama Nemi | %93’ten düşük (yoğuşmasız) | |||||||
| Atmosfer Basıncı | 86kPa ~ 106kPa | |||||||
| Koruma Sınıfı | IP20 | |||||||
| Kontrol Modu | Pozisyon, Hız, Tork, Pozisyon/Hız, Hız/Tork, Pozisyon/Tork | |||||||
| Dijital Giriş | 8 adet programlanabilir giriş terminali (fotoelektrik izolasyonlu) | |||||||
| Dijital Çıkış | 6 adet programlanabilir çıkış terminali (fotoelektrik izolasyonlu) | |||||||
| Encoder Sinyali Çıkışı | A, B, Z diferansiyel çıkış; Z sinyali open collector çıkışı | |||||||
| Pozisyon Giriş Frekansı | Diferansiyel giriş: ≤500kHz, Tek uçlu giriş: ≤200kHz | |||||||
| Komut Modu | Pulse + yön; İleri/geri pulse; Ortogonal pulse | |||||||
| Elektronik Dişli Oranı | 1~32767 / 1~32767 | |||||||
| Hız Komutu Girişi | ±10VDC, giriş empedansı 10kΩ | |||||||
| Hızlanma/Yavaşlama Komutu | Parametre ile ayarlanır (P-060 / P-061) | |||||||
| Hız Komutu Kaynağı | Analog sinyal, dahili hız komutu | |||||||
| Tork Komutu Girişi | -10V ~ +10V, giriş empedansı 10kΩ | |||||||
| Tork Sınırlandırma | Parametre ile ayarlanır (P-065 / P-066) | |||||||
| Tork Komutu Kaynağı | Analog sinyal, dahili tork komutu | |||||||
| Monitör Fonksiyonları | Hız, mevcut pozisyon, pozisyon sapması, motor torku, motor akımı, komut pulse frekansı vb. | |||||||
| Koruma Fonksiyonları | Aşırı hız, aşırı voltaj, aşırı akım, aşırı yük, fren hatası, encoder hatası, pozisyon aşımı, komut aşımı vb. | |||||||
| Hız Frekans Cevabı | ≥800Hz | |||||||
| Hız Dalgalanma Oranı | <±0.03% (yük 0~100%), <±0.02% (güç -15%~+10%) | |||||||
LZ3A Servo Motor Pozisyon Kontrol Modu
| Pozisyon Kontrol Modu İçin Anahtar Parametre Ayarları | ||
| Parametre | Ayar Değeri | Parametre Açıklaması |
| P-004 | Pozisyon kontrol moduna ayarla | |
| P-029 | Elektronik dişli bölücü | |
| P-030 | Elektronik dişli çarpanı | |
| P-035 | Pulse giriş modu 0: Pulse + Yön 1: İleri/Geri Pulse 2: Ortogonal Pulse | |
| P-036 | Pulse yönü 0: Normal Yön 1: Ters Yön | |
| P-005 | Hız döngüsü orantılı kazanç | |
| P-006 | Hız döngüsü integral zaman sabiti | |
| P-009 | Pozisyon döngüsü orantılı kazanç | |
| P-007 | Tork filtreleme zaman sabiti | |
| P-019 | Hız algılama filtreleme zaman sabiti | |
| P-021 | Pozisyon döngüsü ileri besleme kazancı (Aralık: 0-128) | |
| P-022 | Pozisyon döngüsü ileri besleme filtreleme süresi (Birim: 1ms, Kapsam: 2-1000) | |
| P-040 | Pozisyon komut yumuşatma filtresi (Birim: 1ms, Kapsam: 0-1000) | |
| P-024 | Enkoder Pulse çıkış polaritesini ayarla. 0: Ters çevrilmeden, 1: Ters çevirerek | |
LZ3A Analog Tork Kontrol Modu
| Analog Tork Kontrol Modu | |||
| P004 | > | 2 | |
| P026 | > | 0 | |
| P055 | > | Başlangıç yönü değiştirme | |
| P075 | > | Maksimum hız limiti (yüksek hız alarmı) | |
| P078 | > | Çalışma hız aralığı | |
| Parametre E-Set yapıldıktan sonra kapatıldığında POWER IŞIĞI sönene kadar beklenmesi gerekir. | |||
| 0-10 Watt | > | Pin 10 (DA- veya AS-) | |
| 0 Watt | > | Pin 11 (ENDA) | |
| -10 Watt ~ 10 Watt | > | -10Watt v 10 Watt DA+ DA- | |
| Servo ON | > | +24 VDC > COM + (31) | |
| 0 Watt | > | D11 (16) | |
| Alarm | > | 0 Watt > D0 COM (23) | |
| Alarm Input (Negatif) | > | DO2 (5) | |
Torka Ulaştı Haberi İçin Gerekli Parametre ve Şeması İçin Tıklayın ↓
| DO Fonksiyonları Listesi | |||||
| S/N | Sembol | DO Fonksiyonu | S/N | Sembol | DO Fonksiyonu |
| 0 | OFF | Geçersiz oldu | 8 | BRK | Elektromanyetik fren |
| 1 | ON | Geçerli oldu | 9 | RUN | Servo çalışıyor |
| 2 | SRDY | Servo hazır | 10 | NEAR | Konum yakınlığı |
| 3 | ALM | Alarm | 11 | TRQL | Tork sınırı |
| 4 | ZSP | Sıfır hız | 12 | SPL | Hız sınırı |
| 5 | COIN | Konumlandırma tamamlandı | 14 | PtoS | Konum/Hız modu geçişi tamamlandı |
| 6 | ASP | Hız hedefe ulaştı | 15 | PtoT | Konum/Tork modu geçişi tamamlandı |
| 7 | ATRQ | Tork hedefe ulaştı | 16 | StoT | Hız/Tork modu geçişi tamamlandı |
| 20 | DO3_ZOUT | Sıfır noktasına dönüş Z sinyali çıkışı (yalnızca DO3 bu işlevi destekler) | |||
| Dijital Çıkış Parametreleri | |||||
| Parametre | Adı | Parametre Aralığı | Varsayılan Değer | Birim | Geçerli |
| P108 | Dijital giriş DO1 fonksiyonu | -12~12 | 2 | – | TÜMÜ |
| P109 | Dijital çıkış DO2 fonksiyonu | -12~12 | 3 | – | TÜMÜ |
| P110 | Dijital çıkış DO3 fonksiyonu | -12~12 | 8 | – | TÜMÜ |
| P111 | Dijital çıkış DO4 fonksiyonu | -12~12 | 5 | – | TÜMÜ |
| P112 | Dijital çıkış DO5 fonksiyonu | -12~12 | 0 | – | TÜMÜ |
| P113 | Dijital çıkış DO6 fonksiyonu | -12~12 | 0 | – | TÜMÜ |
| Tork Parametreleri | |||||
| Parametre | Adı | Parametre Aralığı | Varsayılan Değer | Birim | Geçerli |
| P157 | Tork Erişim Seviyesi | -300~300 | 100 | % | TÜMÜ |
| P158 | Erişilen Tork Farkı | 0~300 | 5 | % | TÜMÜ |
| P159 | Erişilen Tork Polaritesi | 0~1 | 0 | – | TÜMÜ |
Dahili Hız Ayar Modunu Değiştirme
| Dahili Hız Ayar Modunu Değiştirme | |||
| P004 | > | 3 (Switch Pulse/Speed) | |
| P104 | > | 16 (Pin2 CMODE) | |
| P025 | > | 1 (Internal Set Speed) | |
| P097 | > | 33 (Limit İptal) | |
| P075 | > | Maksimum Hız | |
| P060 | > | Kalkış Zamanı | |
| P061 | > | Duruş Zamanı | |
| P138 | > | 1. Dahili Hız (Pin 1) | |
| P139 | > | 2. Dahili Hız (Pin 17) | |
| P140 | > | 3. Dahili Hız (Pin 1+17) | |
| P101 | > | 10 | |
| P102 | > | 11 | |
| Bağlantı Bilgileri için Tıklayın ↓ | |||
| +24 VDC | > | Pin 31 (Bağlı Kalacak) | |
| 0 Volt | > | Pin 16 (Servo ON) | |
| 0 Volt | > | Pin 1 (1. Hız) | |
| 0 Volt | > | Pin 17 (2. Hız) | |
| 0 Volt | > | Pin 1 + Pin 17 (3. Hız) | |
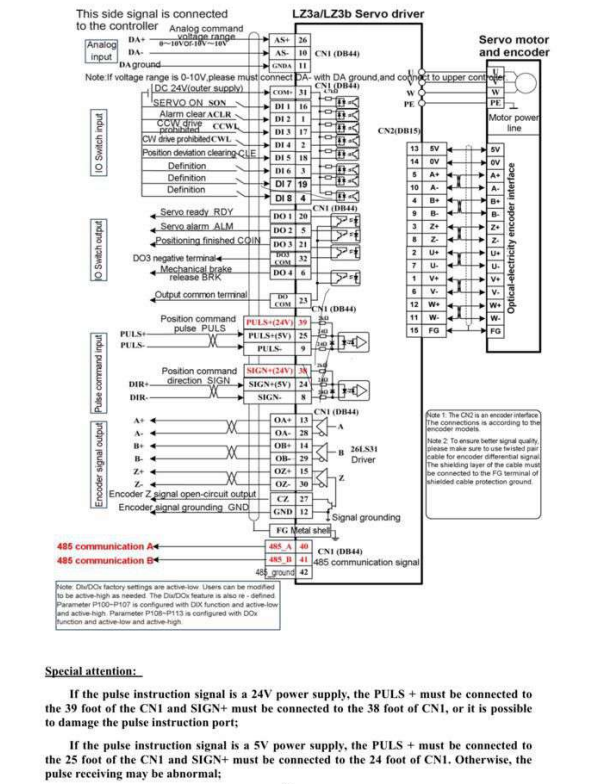
LZ3A Kablo Numaraları
| 24V Bağlantıları | |
| SIGN+ | 38 |
| SIGN- | 8 |
| PULS+ | 39 |
| PULS- | 9 |
| ALM+ | 5 |
| ALM- | 23 |
| SON | 16 |
| COM+ | 31 |
| 5V Bağlantıları | |
| SIGN+ | 24 |
| SIGN- | 8 |
| PULS+ | 25 |
| PULS- | 9 |
| ALM+ | 5 |
| ALM- | 23 |
| SON | 16 |
| COM+ | 31 |
Dijital Giriş ve Çıkış Fonksiyonları Listesi
| DO Fonksiyon Listesi | ||
| No | Sembol | DO Fonksiyonu |
| 0 | NULL | Fonksiyon yok |
| 1 | ALM | Alarm çıkışı |
| 2 | INP | Konumda çıkışı |
| 3 | SERVO | Servo açık durumu |
| 4 | DIR | Dönüş yönü |
| 5 | ZSPD | Sıfır hız tespiti |
| 6 | SPD | Hız tespiti |
| 7 | ZERO | Sıfır pozisyonu |
| 8 | WARN | Uyarı çıkışı |
| 9 | VREADY | Hazır çıkışı |
| 10 | HOLD | Konum tutma çıkışı |
| 11 | EMGS | Acil durdurma çıkışı |
| 12 | SPO1 | Hız seçimi çıkışı 1 |
| 13 | SPO2 | Hız seçimi çıkışı 2 |
| 14 | TPO1 | Tork seçimi çıkışı 1 |
| 15 | TPO2 | Tork seçimi çıkışı 2 |
| 16 | LOCK | Kilit sinyali |
| 17 | CMP | Konum karşılaştırma eşleşmesi |
| 18 | TRQ | Tork tespiti |
| 19 | LOAD | Yük oranı tespiti |
| 20 | CMPO | Karşılaştırma çıkışı |
| 21 | COIN | Uyum çıkışı |
| 22 | CMDIR | Komut yönü çıkışı |
| 23 | WARN2 | İkinci uyarı çıkışı |
| DI Fonksiyon Listesi | ||
| No | Sembol | DI Fonksiyonu |
| 0 | NULL | Fonksiyon yok |
| 1 | SON | Servo açık/kapalı |
| 2 | EMG | Acil durdurma sinyali |
| 3 | SPD0 | Hız seçimi sinyali 0 |
| 4 | SPD1 | Hız seçimi sinyali 1 |
| 5 | SPD2 | Hız seçimi sinyali 2 |
| 6 | TQD0 | Tork seçimi sinyali 0 |
| 7 | TQD1 | Tork seçimi sinyali 1 |
| 8 | ORG | Referans konum sıfırlama |
| 9 | CLR | Alarm sıfırlama |
| 10 | HOLD | Konum tutma etkinleştirme |
| 11 | CCLR | Konum karşılaştırma sıfırlama |
| 12 | PSON | Darbe çıkış açık/kapalı |
| 13 | TRQS | Tork sınır tespiti |
| 14 | PGSEL | Sayfa seçimi sinyali |
| 15 | PC | Konum komut sıfırlama |
| 16 | SPD3 | Hız seçimi sinyali 3 |
| 17 | SPD4 | Hız seçimi sinyali 4 |
| 18 | TQD2 | Tork seçimi sinyali 2 |
| 19 | TQD3 | Tork seçimi sinyali 3 |
| 20 | FCLR | Karşılaştırma çıkışı sıfırlama |
Enkoder Üzerinden Oryantasyon (Encoder Home)
| Servo Sürücü Parametre ve Bağlantı Ayarları | |
| Parametre / Pin | Değer / Bağlantı |
| P-004 | 3 |
| Speed Mod | 0-10V |
| Pin 31 | +24V |
| Pin 16 | Servo Enable |
| Pin 2 | CW |
| Pin 17 | CCW |
| NOT: SPEED MOD ENABLE OLMADAN DA ÇALIŞIYOR | |
| Pin 18 | Orient |
| NOT: ORIENT MOD ENABLE OLMADAN DA ÇALIŞIYOR | |
| P184 | Orient Hızı |
| P185 | Orient Konumu |
| D-APo | Encoderin Konumu |
| Default Input Ayarları | |
| P100 | -1 |
| P101 | -16 |
| P102 | -3 |
| P103 | -4 |
| P104 | -22 |
| P105 | -10 |
| Pin 23 | GND |
| Pin 24 | +24V |
| Pin 22 | Röle – NPN |
130LZ-M06025LB Teknik Çizim
LZ3A Servo Bağlantı Şeması
LZ3A Servo Özet Manuel

LZ3A Servo Full Manuel

Servo Motor 3D Modeli

| Güç | 1.5 kW |
|---|---|
| Tork | 6.0 Nm |
| Devir | 2500 rpm/min |
| Flanş | 130×130-mm |
| Servo Motor Sürücü | LZ Serisi |
| Servo Motor Voltaj | 220 Volt |
Bu üründe 0 yorum mevcut
“Servo Motor 1.5 kW – 130LZ-M06025 – LZ3a-30LN” için ilk yorumu yap!
İnceleme göndermek için giriş yapmış olmanız gerekir.




Bu ürün için henüz yorum yapılmadı.